
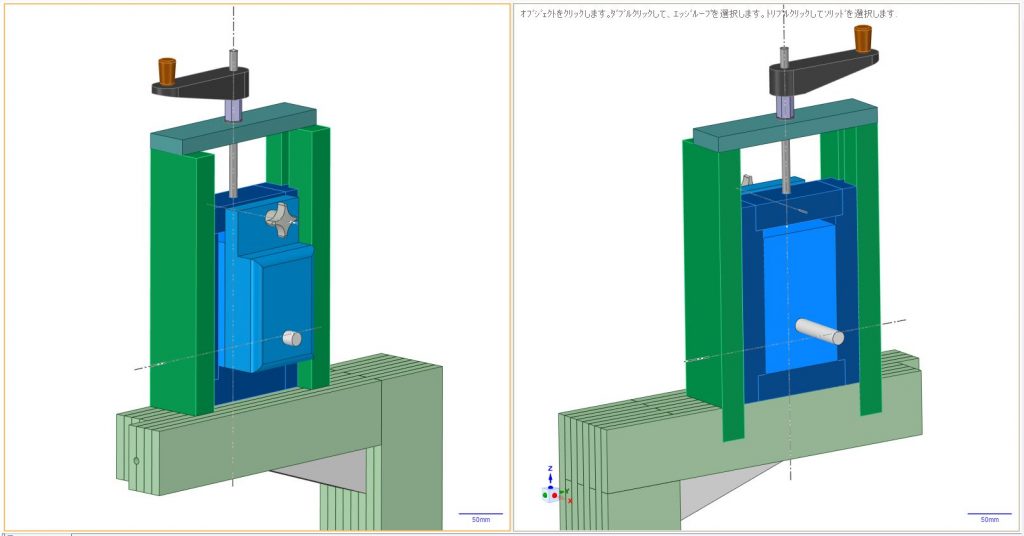
ハンドルを回すと濃い青色部分を昇降することができます。これによりブレードをホイールに嵌めて、強く引っ張りピンピンに張ることができます。また、左図のノブを回すと薄い青色部が前後に傾斜させることができます。これは高速回転するホイールからブレードが外れないように調整するためのものです。この調整をトラッキングと呼ばれています。
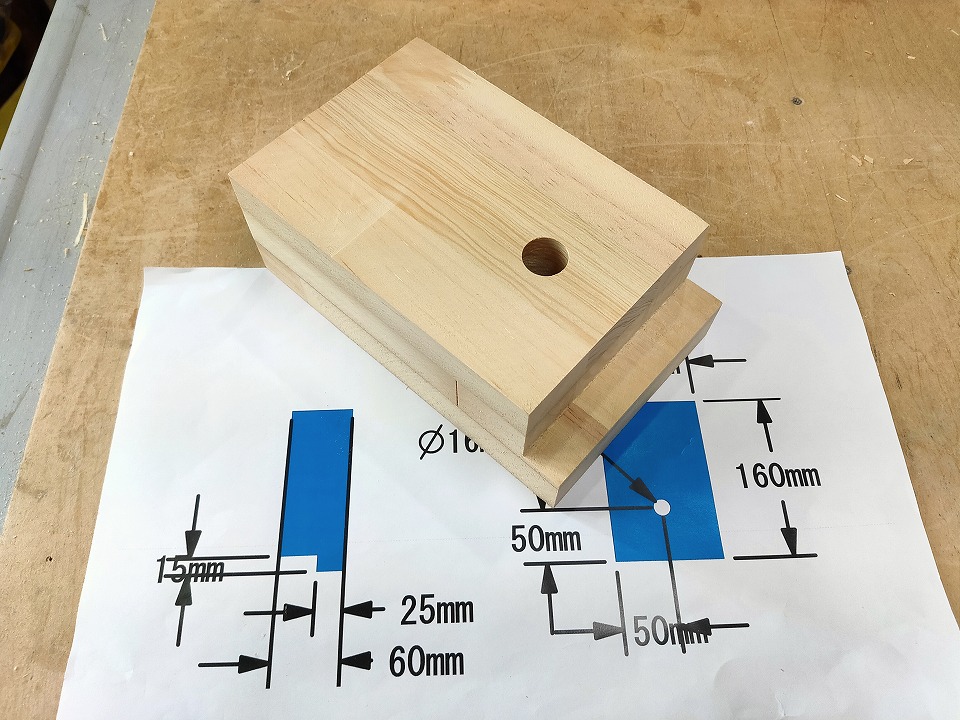
作成済みのトラッキングコア部(前部)の部品です。
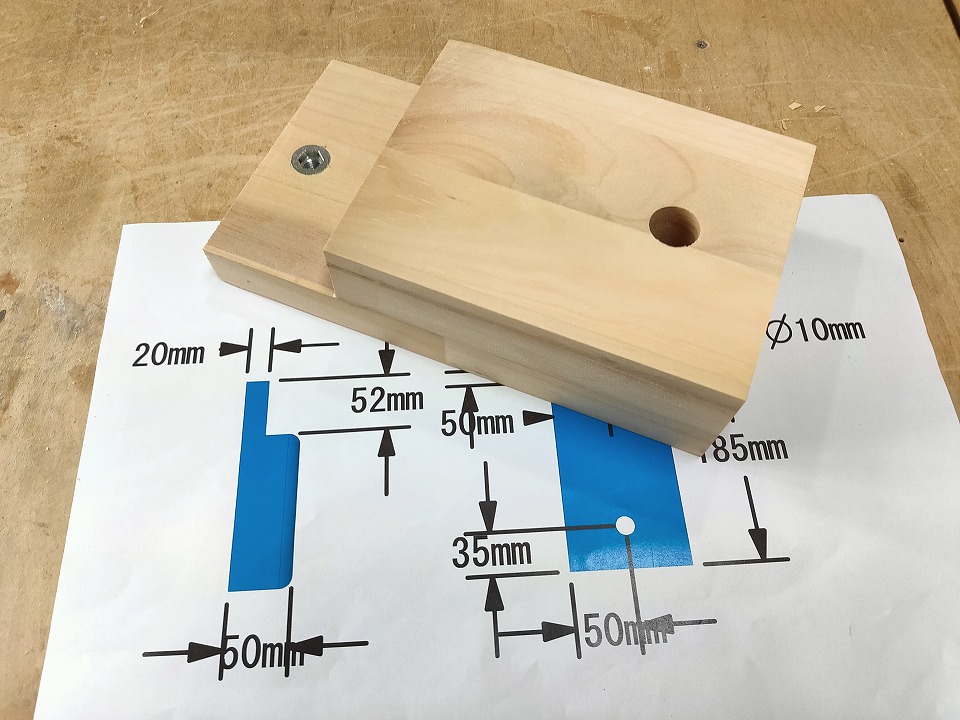
こちらも作成済みのトラッキングコア部(後部)の部品です。

2つのトラッキングコア部品を合体します。Φ16の穴にシャフトを差し込んで2つの部品を位置決めしてボンドで接着しています。クランプでがっちり固定して乾くのを待ちます。

トラッキングコアの完成です。シャフトの先に14インチのホイールを取り付けるので、重量バランス的にはこれぐらいの大きさ、重量が必要になります。

写真のようにトラッキングコア部は前後に傾斜できるようにする必要があります。この仕組みはなかなき決まらず他の部品の製作の間も検討していました。設計段階で決め切れていなかった箇所です。

いいアイデアを思いつきましたが、決め切れていなかったにも関わらず、昇降部の枠を接着してしまったのは少し後悔しました。というのもアイデアを作り込むには接着しない方がやりやすかったからです。
写真は昇降部の枠に穴を開ける必要がありますが貫通穴を開けるしか方法がありませんでした。本当は枠の内側に穴を開けたかったです。貫通穴はちょっと不細工です。

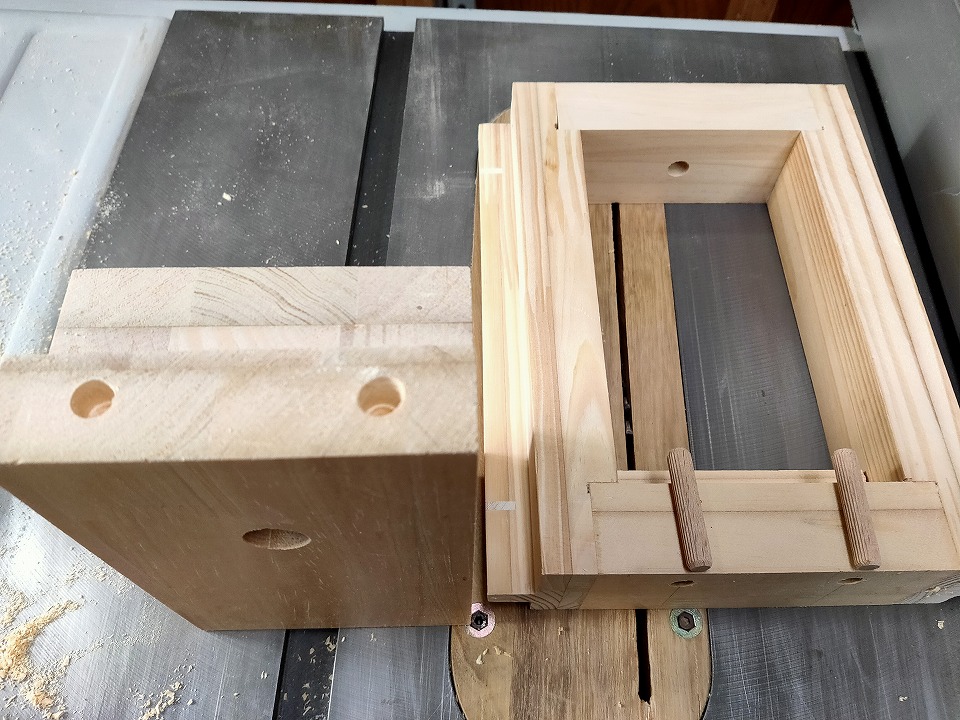
枠の外から貫通穴を開けたところです。

トラッキングコア側にも同じ位置に穴を開けるため、ダボ用の治具を使って穴のセンターをマーキングします。

押しピンのような治具でトラッキングコア側の穴位置をマークしました。2つのわずかな窪みが見えます。

トラッキングコア側に明けた穴です。こちらは深さ12~3㎜の深さです。
アイデアは、ダボを使って連結する方法です。枠側にダボを通して固定します。トラッキングコア側はダボの径より大きい穴を開けて、出っ張ったダボを嵌めます。これにより、トラッキングコア部はダボで引っ掛かり止まりますが、ダボより大きい穴のためぐらぐらと前後に可動することができるようになります。

まず、枠にダボを差し込みます。きついのでクランプで挟んで押し込みます。

枠に2本のダボを差し込んだところです。ちょうど10㎜程出ているのがミソです。出過ぎると引っ掛かり枠にトラッキングコア部を嵌めることができません。短すぎると、トラッキングコア部が浮いて枠から外れる恐れがあります。

トラッキングコア部をダボに嵌めたところです。


写真のようにトラッキングコア部が前後に可動できるようになりました。